
I am currently a Postdoctoral Research Associate at Queen Mary University of London, working with Dr. Changjae Oh and Prof. Andrea Cavallaro. Previously, I was a visiting scholar at the University of Bath. During my PhD, I have interned at AWS AI and IIT PAVIS.
I received my PhD from ITC, University of Twente in 2025, under the supervision of Prof. Michael Yang and Prof. George Vosselman. My thesis committee members are Prof. Vittorio Murino, Prof. Theo Gevers, Prof. Francesco Nex, and Prof. Bojana Rosic. Prior to this, I obtained my master’s degree from Wuhan University in 2021, advised by Prof. Shunping Ji.
I am broadly interested in Artificial Intelligence at the intersection of Computer Vision and Machine Learning.
My publication received a total citations.
If you are interested in my research or potential collaboration opportunities, please feel free to contact me! Here is my CV :)
Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
 University of TwentePh.D. in Generative Artificial Intelligence2021 - 2025
University of TwentePh.D. in Generative Artificial Intelligence2021 - 2025 -
 Wuhan UniversityM.S. in Machine Learning & Remote Sensing2018 - 2021
Wuhan UniversityM.S. in Machine Learning & Remote Sensing2018 - 2021 -
 China University of PetroleumB.S. in Geographic Information Science2014 - 2018
China University of PetroleumB.S. in Geographic Information Science2014 - 2018
Experience
-
 Queen Mary University of LondonPostdoctoral Research AssociateJanuary 2026 - present
Queen Mary University of LondonPostdoctoral Research AssociateJanuary 2026 - present -
 University of BathVisiting ScholarSeptember 2025 - December 2025
University of BathVisiting ScholarSeptember 2025 - December 2025 -
 Amazon Web ServicesApplied Scientist InternJanuary 2025 - April 2025
Amazon Web ServicesApplied Scientist InternJanuary 2025 - April 2025 -
 Italian Institute of TechnologyVisiting ScientistJuly 2024 - December 2024
Italian Institute of TechnologyVisiting ScientistJuly 2024 - December 2024
News
Selected Publications (view all )
Planner3D: LLM-enhanced Graph Prior Meets 3D Indoor Scene Explicit Regularization
Yao Wei, Martin Renqiang Min, George Vosselman, Li Erran Li, Michael Ying Yang
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) 2025
In this paper, we aim at generating realistic and reasonable 3D indoor scenes from scene graph. To enrich the priors of the given scene graph inputs, large language model is utilized to aggregate the global-wise features with local node-wise and edge-wise features. With a unified graph encoder, graph features are extracted to guide joint layout-shape generation. Additional regularization is introduced to explicitly constrain the produced 3D layouts. Benchmarked on the SG-FRONT dataset, our method achieves better 3D scene synthesis, especially in terms of scene-level fidelity.
Planner3D: LLM-enhanced Graph Prior Meets 3D Indoor Scene Explicit Regularization
Yao Wei, Martin Renqiang Min, George Vosselman, Li Erran Li, Michael Ying Yang
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) 2025
In this paper, we aim at generating realistic and reasonable 3D indoor scenes from scene graph. To enrich the priors of the given scene graph inputs, large language model is utilized to aggregate the global-wise features with local node-wise and edge-wise features. With a unified graph encoder, graph features are extracted to guide joint layout-shape generation. Additional regularization is introduced to explicitly constrain the produced 3D layouts. Benchmarked on the SG-FRONT dataset, our method achieves better 3D scene synthesis, especially in terms of scene-level fidelity.
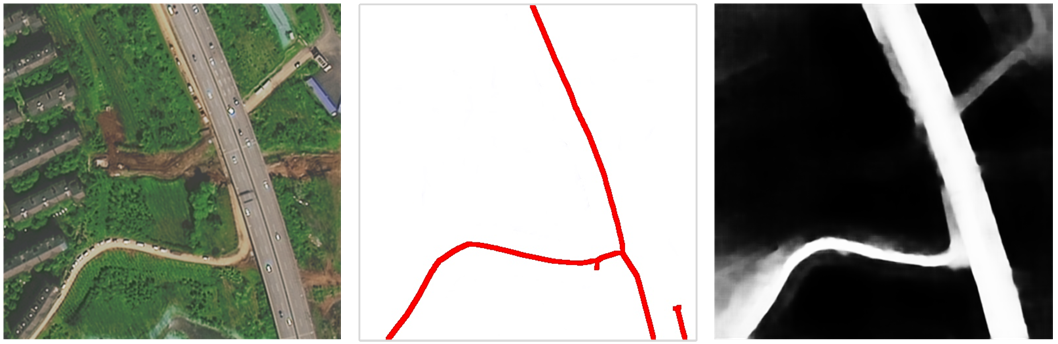
Scribble-based Weakly Supervised Deep Learning for Road Surface Extraction from Remote Sensing Images
Yao Wei, Shunping Ji
IEEE Transactions on Geoscience and Remote Sensing (TGRS) 2021 ESI Highly Cited Paper (Top 1%)
A scribble-based weakly supervised road surface extraction method named ScRoadExtractor, which learns from easily accessible scribbles such as centerlines instead of densely annotated road surface ground truths to propagate semantic information from sparse scribbles to unlabeled pixels. The results demonstrate that ScRoadExtractor exceeds the classic scribble-supervised segmentation method by 20% for the intersection over union (IoU) indicator and outperforms the state-of-the-art scribble-based weakly supervised methods at least 4%.
Scribble-based Weakly Supervised Deep Learning for Road Surface Extraction from Remote Sensing Images
Yao Wei, Shunping Ji
IEEE Transactions on Geoscience and Remote Sensing (TGRS) 2021 ESI Highly Cited Paper (Top 1%)
A scribble-based weakly supervised road surface extraction method named ScRoadExtractor, which learns from easily accessible scribbles such as centerlines instead of densely annotated road surface ground truths to propagate semantic information from sparse scribbles to unlabeled pixels. The results demonstrate that ScRoadExtractor exceeds the classic scribble-supervised segmentation method by 20% for the intersection over union (IoU) indicator and outperforms the state-of-the-art scribble-based weakly supervised methods at least 4%.